Перечень чертежей:
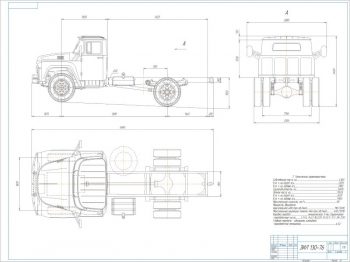
- Общий вид погрузчика с шарнирно-сочлененным грузоподъемником А1 с технической характеристикой:
- Грузоподъемность 1 т
- Расстояние от центра тяжести груза до спинки вил 500 мм
- Скорость передвижения 13 км/ч
- Колея передняя 960 мм
- Колея задняя 780 мм
- Дорожный просвет 50 мм
- Габаритные размеры:
- Длина с вилами 3860 мм
- Ширина 1120 мм
- Масса погрузчика 4 т
- Сборочный чертеж грузоподъемника формата А1
- Механизм поворота в сборе А1:
- Перед сборкой все детали промыть и высушить
- На трущихся и сопряжаемых поверхностях деталей не допускается наличие рисок, заусенец и других механических повреждений
- Скручивание уплотнений при монтаже не допускается
- При испытании рейка с поршнями должны перемещаться на всей длине хода в обе стороны плавно, без вибраций при давлении масла не более 0.5 мПа
- Испытать на герметичность давлением 25 мПа в течение 30 с маслом М-12 ВуТУ38-001-248-76 при температуре масла 35 С -15 С в двух крайних положениях рейки
- Утечки через уплотнения не допустимы
- Отверстия для подвода жидкости заглушить пробками
- После испытаний масло слить, в случае хранения гидроцилиндра свыше суток, все обработанные и не окрашенные наружные поверхности покрыть тонким слоем смазки
- Поворотный грузоподъемник в сборе А1
- Деталь приводное колесо А1
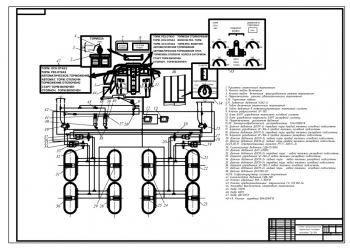
- Гидравлическая схема А1 с указанием основных позиций:
- Бак масляный
- Дроссель постоянного расхода
- Клапан предохранительный с переливным золотником
- Цилиндр подъема и наклона
- Распределитель
- Насос
- Фильтр сливной и заливной
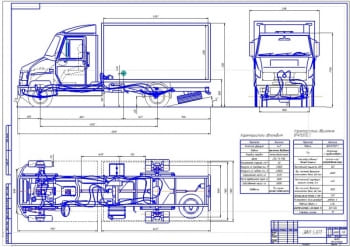
- Чертеж экономической эффективности совершенствования конструкции погрузчика А1 с таблицами сравнительной технико-экономической характеристики погрузчика и штабелера, расчета чистых денежных потоков и графиком зависимости чистой текущей стоимости от ставки дисконтирования
Дополнительные материалы: прилагается расчетно-пояснительная записка на 66 листах.
Проведен анализ вариантов конструктивного исполнения электропогрузчика.
Рассмотрено конструктивное исполнение ведущего моста. Установлено, что конструкция погрузчика с поворотным мостом имеет ряд преимуществ перед конструкцией с жестким мостом. Например, погрузчику с поворотным мостом необходима меньшая ширина проходов для проезда по складу, что дает возможность увеличить полезную площадь склада за счет уменьшения ширины проездов. Также у погрузчика с поворотным мостом уменьшается время цикла штабелирования груза за счет упрощения процесса погрузки груза в штабель.
На основании изученного материала конструкций принято в разрабатываемом погрузчике использовать поворотный передний мост. Поворотное устройство для поворота моста по принципу действия имеет сходство с поворотным устройством погрузчика ЭП-1008 (зубчатая рейка на гидроцилиндре обкатывает зубчатое колесо).
Выполнено описание конструкции и предварительная разработка общего вида машины. Электропогрузчик представляет собой самоходную четырехопорную машину. Корпус представляет собой несущую конструкцию, которая состоит из рамы, капота и отсека противовеса.
Сваренные между собой борта, поперечины, уголки, планки, листы и кронштейны образуют раму, к которой прикреплены узлы и детали электропогрузчика. При снятии полика обеспечивается доступ к рулевому управлению, приводу.
Хорошая устойчивость погрузчика помимо четырехопорной схемы обеспечивается расположением аккумуляторной батареи в задней части шасси. Передний ведущий мост состоит из: тягового электродвигателя и двухступенчатого цилиндрического редуктора на каждое переднее колесо с массивной литой шиной. Двигатель четырьмя шпильками прикреплен к корпусу редуктора. В отверстие вала двигателя входит шлицевый конец ведущего вала-шестерни, вращающийся на двух шариковых подшипниках. На его выходном конусном конце смонтирован тормозной шкив. Предусмотрены манжеты для уплотнения выходных концов ведущего вала-шестерни.
Установка подшипников произведена в распор. Зазор для нормальной работы подшипников регулируется необходимым числом прокладок.
Промежуточная шестерня смонтирована на шариковом подшипнике на оси, которая неподвижно закреплена в крышке редуктора. Уплотнение оси осуществляется с помощью резиновых колец.
Первая ступень редуктора — ведомая цилиндрическая шестерня насажена на шлицевый конец вала-шестерни, который установлен на двух подшипниках. На шейке вала-шестерни смонтирована манжета, которая уплотняет редуктор.
Вторая ступень редуктора — внутреннее зацепление шестерен — сделана в колесе и включает ведущий вала-шестерню и зубчатый венец, прикрепленный к ступице. Ось колеса заварена во фланце и соединена неподвижно болтами с крышкой редуктора. Посадка ступицы выполнена на ось на подшипниках, осевое перемещение которых регулируется гайкой. В качестве уплотнителя внутреннего зацепления используется войлочное кольцо. Корпус тормозного устройства закреплен на крышке редуктора винтами и предназначен для установки на нем тормозных колодок. Шина ведущего колеса массивная.
Колеса ведущего моста оснащены колодочными тормозами, которые установленны на ведущих валах редукторов и выполняют функции рабочего и стояночного тормозов.
На электропогрузчике установлен грузоподъемник с высотой подъема 6,55 м трехрамной конструкции. Грузоподъемник расположен в передней части машины и состоит из внутренней и двух наружных рам, каретки, цилиндра подъема и цепи. Наклон грузоподъемника от вертикального положения производится цилиндрами наклона. Рамы представляют собой вертикальные стойки, выполненные из двутаврового и швеллерного профилей, соединенных между собой поперечными связями. В нижней части внутренней рамы и в верхней части наружных рам закреплены катки. Катки выполнены на подшипниках качения, служат для подвижного соединения рам.
Каретка подвешена на двух цепях, переброшенные через гладкие ролики, установленные на траверсе цилиндра подъема. На плиту каретки навешиваются вилы или сменные грузозахватные приспособления.
Привод грузоподъемника гидравлический. Гидравлическая схема включает в себя: электродвигатель, гидронасос, масляный бак, гидрораспределитель, трубопровод, гибкие рукава и гидравлические устройства. Для регулировки расхода и давления рабочей жидкости в гидросистеме предусмотрены предохранительные клапаны и дроссели. Аккумуляторная батарея, установленная в задней части электропогрузчика, служит источником питания.
Все приборы управления размещены на передней панели у рабочего места оператора.
Произведена разработка отдельных механизмов и узлов. Сделана разработка механизма передвижения. Произведен выбор электродвигателя. Принят двигатель механизма передвижения 3ДТ-32 мощностью 1,5 кВт, частота вращения 2750 об/мин.
Выполнен расчет валов и осей на прочность. Расчет вала-шестерни, подшипников и оси колеса произведен при помощи программы АРМ «WinShaft».
Приведена конструкторская часть. Выполнено описание конструкции грузоподъемника. Грузоподъемный механизм служит для вертикального перемещения груза. Для удобства взятия и укладки груза, а также для устойчивости груза при его транспортировке подъемник имеет наклон вперед и назад из вертикального положения.
В проектируемом погрузчике применяется трехрамный грузоподъемник с высотой подъема груза 6,55 м. У трехрамного грузоподъемника наружная рама неподвижная, а средняя и внутренняя подвижные, цилиндр подъема одностороннего действия и две цепи каретки. Средняя рама перемещается по роликам вдоль наружной, а внутренняя рама вдоль средней.
Эксцентриковая ось боковых роликов дает возможность регулировки боковых зазоров между роликами и рамами. Натяжением цепей регулируются тяги, разница в натяжении компенсируется балансиром, закрепленным на оси каретки.
Трехрамный грузоподъемник закреплен шарнирно на кожухах полуосей ведущего моста.
Каретка и рамы грузоподъемников выполняют перемещение на катках по направляющим грузоподъемников. В качестве направляющих применяются швеллерный, двутавровый и другие профили. Катки могут распологаться как на наружной раме, так и на внутренней подвижной раме. Сочетание профилей для внутренней и наружной рам имеет минимальное поперечное сечение для обеспечения лучшей видимости водителю.
Произведен расчет грузоподъемника с определением основных значений. Произведено описание гидравлической системы. Рассмотрено устройство и принцип работы гидравлического привода. Выполнен расчет гидроцилиндра поворота грузоподъемника.
Приведен расчет экономической эффективности применения разрабатываемого электропогрузчика грузоподъемностью 1 т с поворотным грузоподъемником.
3а базовый вариант сравнения в расчете экономической эффективности принят электроштабелер CQD15L, предназначенный для погрузочно-разгрузочных и подъемно-транспортных работ.
На заданном складе производится замена электроштабелеров CQD15L на разработанные электропогрузчики и определяется экономический эффект.
Составлена технико-экономическая характеристика:
|
№ п/п |
Показатели |
CQD15L |
Разрабатываемый погрузчик |
|
1 |
Грузоподъемность, кг |
1500 |
1000 |
|
2 |
Масса, кг |
2900 |
4000 |
|
3 |
Высота подъема груза, м |
5 |
6,55 |
|
4 |
Максимальная скорость передвижения с грузом, м/с |
1,2 |
3 |
|
5 |
Скорость подъема каретки с грузом, м/с |
0,2 |
0,24 |
|
6 |
Скорость опускания каретки, м/с с грузом, без груза |
0,4 / 0,2 |
0,5 / 0,45 |
|
10 |
Нормативный срок службы, лет |
8 |
8 |
|
11 |
Продолжительность рабочего цикла, с |
202 |
131 |
|
12 |
Эксплуатационная производительность, т/час |
13,4 |
20,7 |
|
15 |
Обслуживающий персонал, чел |
32 |
22 |
|
16 |
Цена погрузчика, руб |
750000 |
1 400 000 |
|
19 |
Количество погрузчиков для выполнения заданного объема работ, шт |
6 |
4 |
Описана безопасность персонала при обслуживании электропогрузчика с шарнирно-сочлененным грузоподъемником.
Спецификация – 6 листов
В программе: Компас 3D v, AutoCad

Мостовой стеллажный крана-штабелеа
Код: 03.01.02.08.105Количество чертежей: 7 штук
Спецификация – 13 листов
В программе: Компас 3D v, AutoCad

Модернизация строительного башенного крана КБ-405.1А
Код: 03.01.02.08.104Количество чертежей: 7 штук
Спецификация – 14 листов
В программе: Компас 3D v, AutoCad

Двухбалочный мостовой кран общего назначения
Код: 03.01.02.08.103Количество чертежей: 3 штуки
В программе: Компас 3D v, AutoCad

Вилочный погрузчик Hyundai 35DF-7
Код: 03.01.02.08.102Количество чертежей: 2 штуки
В программе: Компас 3D v, AutoCAD

Вилочный погрузчик DFG 320
Код: 03.01.02.08.101Количество чертежей: 1 штука
В программе: Компас 3D v, AutoCAD

Проект конструкции портального крана грузоподъемностью 20 т
Код: 03.01.02.08.100Количество чертежей: 5 штук
Спецификация – 5 листов
В программе: Компас 3D v, AutoCad