Чертеж кинематической схемы вертикально-сверлильного станка типа 2Р135Ф2, А2.
На станке, оснащенном ЧПУ, реализуются движения:
- Резания - вращение шпинделя револьверной головки
- Подач - вертикальное перемещение суппорта и крестового стола
- Вспомогательные движения – поворот револьверной головки, ускоренное перемещение суппорта и крестового стола
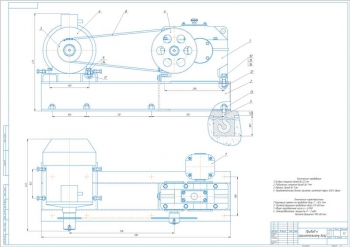
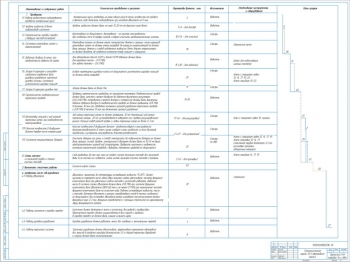
Конструкция агрегата выполнена из привода перемещения суппорта, шестипозиционной револьверной головки, крестового стола, привода поперечного и продольного перемещения стола, коробки скоростей, стойки и основания.
В револьверную головку, в пять ее шпинделей, выполняется установка инструментов для обработки отверстий. В шестой шпиндель устанавливаются фрезы. За счет поворота головки каждый шпиндель устанавливается в рабочую позицию. Посредством ЧПУ обеспечивается раздельное или одновременное перемещение стола по координатам, перемещение суппорта с револьверной головкой, управление поворотом последней.
Передача движение резания выполняется от двухскоростного двигателя в коробку скоростей, в которой оно передается между валами посредством шестерен и далее на шпиндель. Движение подач крестового стола располагает двумя редукторами. Один обеспечивает его движение по салазкам, другой –салазок по станине. За счет кинематической цепи привода обеспечивается скорость их передвижения.
Дополнительные материалы: 7 страниц с расчетами и пояснениями.
Программа: Компас 3D v

Кинематическая схема вертикально-сверлильного станка 2Н135
Код: 03.01.05.02.03.33Дополнительные материалы: 6 страниц
Программа: Компас 3D v

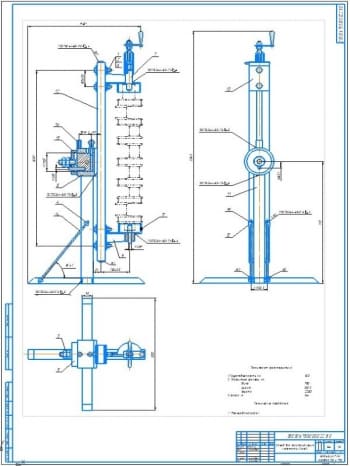
Привод подач вертикального сверлильного станка типа 2Н135
Код: 03.01.05.02.03.32Спецификация – 3 листа
Программа: Компас 3D v

Конструкция коробки скоростей радиально-сверлильного станка
Код: 03.01.05.02.03.31Спецификация – 3 листа
Программа: Компас 3D v

Чертеж коробки скоростей вертикально-сверлильного станка 2Н135
Код: 03.01.05.02.03.30Спецификация – 4 листа
Программа: Компас 3D v

Кинематика вертикально-сверлильного станка типа 2Н135
Код: 03.01.05.02.03.29Программа: Компас 3D v

Чертеж радиально-сверлильного станка
Код: 03.01.05.02.03.28Спецификация: на чертеже
Программа: Компас 3D v