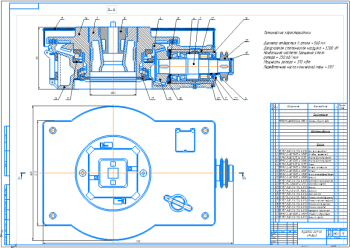
Сборочный чертёж захвата - манипулятор для цилиндрической детали А1
Обхват осуществляется цилиндрической детали двумя рычагами-губками по характерным местам касания круглой поверхности. Их основания имеют цилиндрические оси качания в разные стороны, а внешние круглые рельефы – зубчатую секторную нарезку. Она сопрягается по общему центральному червяку, придающим удерживающее усилие. В радиальном направлении установлен подвесной кронштейн с резьбовыми стержнями-упорами. Вал червяка механически связан с подпружиненной осью, на которой установлена одна из конических шестерён внешнего привода. Предусмотрена рычажно-сочленённая система измерения создаваемого усилия захвата. Все элементы заключены в закрытый корпус, прибор – в защитный чехол.
Механизм с разжатыми губками подводится к захватываемой детали и ставится на упоры. Вращением конической зубчатой передачи передаётся крутящий момент на червяк, а от него на зажимы заготовки. Точность подвода рычагов с двух направлений и их синхронность обеспечивается геометрическими свойствами червячного зацепления. Усилие сверяется по контрольному прибору индикаторного типа через смотровое окно. Надёжно закреплённый материал поднимается и перемещается в необходимое место. Разжим производится обратной последовательностью действий. Губки изготавливаются из высокопрочной износостойкой стали. Червяк закалённый, нарезка бронзированная. Обязательно соблюдение посадок сопряжений.
Некоторые геометрически-массовые характеристики захвата:
|
Диаметр удерживаемого цилиндра |
Высота приложения силы |
Ширина захватов |
Вес заготовки |
|
0,1м |
65мм |
20мм |
5,2кг |
Программа: Компас 3D v

Набор чертежей строповочного узла
Код: 03.01.09.22.17Спецификация – 3 листа
Программа: Компас 3D v

Конструкция схвата погрузочного манипулятора
Код: 03.01.09.22.16Спецификация – 1 лист
Программа: Компас 3D v

Конструкция крюкоблока типа УТБК-5-270
Код: 03.01.09.22.15Спецификация – 1 лист и на чертеже
Программа: Компас 3D v

Конструкция крюковой обоймы автокрана
Код: 03.01.09.22.14Спецификация – 1 лист
Программа: Компас 3D v и AvtoCAD

Грузоподъемный кран
Код: 03.01.09.22.13Программа: Компас 3D v

Набор чертежей крюковой подвески
Код: 03.01.09.22.12Спецификация – 3 листа
Программа: Компас 3D v
Последние просмотренные материалы