Перечень чертежей:
- Чертеж анализа существующих конструкций рулевых механизмов транспортных средств на формате А1:
Схема рулевого управления с механическим приводом: 1-рулевое колесо; 2-сошка; 3-рулевой механизм; 4-продольная тяга; 5-угловой поворотный рычаг; 6-поперечная тяга; 7-поворотный рычаг; 8-цапфа колеса.
Схема рулевого управления с двухконтурным ГОРУ: 1-руль; 2-золотник; 3-насос дозатор; 4-малый дроссель; 5-распределительный золотник; 6-силовой г.ц.; 7-большой дроссель; 8-регулятор давления; 9-дозатор; 10-регулятор потока;11-обратный клапан; 12-гидронасос; 13-бак; 14-обратный клапан.
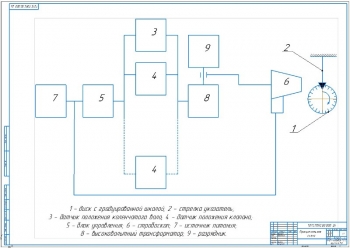
Схема рулевого управления с электромеханическим усилителем руля: 1-датчик крутящего момента на рулевом колесе; 2-электронный блок управления; 3-электродвигатель; 4-шестерня вала рулевого управления; 5-зубчатая рейка; 6-шестерня усилителя руля; 7-карданный вал рулевого управления; 8-датчик угла поворота рулевого колеса.
Схема рулевого управления с гидравлическим усилителем руля:
1-руль; 2-поворотный вал; 3-сектор; 4-рейка; 5-поршень; 6-золотник; 7-червяк; 8-насос; 9-бак.
Дополнительные материалы: Пояснительная записка на 16 стр.
В пояснительной записке было выполнено проектирование конструкции электроусилителя. Проведен обзор имеющихся конструкций рулевых механизмов.
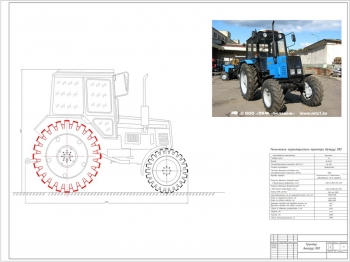
Выполнено общее описание разрабатываемой конструкции. Электромеханический усилитель руля (ЭМУР) представляет собой безредукторную электромеханическую систему с электронным управлением, предназначенную для уменьшения усилия, прикладываемого к рулевому колесу водителем, и повышения быстродействия выполнения команды на изменение направления движения.
Работает конструкция следующим образом. При повороте рулевого колеса водителем возникает момент на входном валу, происходит рассогласование между входным и выходным валами. Расположенный между ними упругий элемент торсион скручивается на угол, пропорциональный величине момента. Величина этого угла определяется датчиком момента. Этот угол является заданием на систему управления двигателем.
При превышении момента на входном валу заданного минимального момента блок управления электродвигателем вырабатывает силовой управляющий сигнал, приложенный к обмоткам электродвигателя, для создания на рулевом механизме требуемого компенсирующего момента. При этом величина сигнала на обмотке формируется с учетом сигналов датчика положения ротора и датчика момента на руле. В блок управления поступают сигналы от датчика скорости и датчика числа оборотов коленчатого вала. При увеличении скорости компенсирующий момент падает.
Таким образом, поворот колес трактора осуществляется за счет объединения усилий, передаваемых от рулевого колеса и электродвигателя усилителя.
Построена структурная схема системы электромеханического усилителя руля. Приведены основные технические характеристики электроусилителя:
- напряжения питания (номинальное) - 12 В;
- максимальный компенсирующий момент - 35 Нм;
- максимальный ток потребления - 50 А;
- ток потребления (усилие на рулевом колесе приложено, выходной вал усилителя заблокирован) - не более 15 А;
- масса электроусилителя вместе с рулевой колонкой - 12 кг.
Выполнен прочностной расчет элементов конструкции. Были найдены диаметр вала: ωвых = 77,5 с-1, Твых = 3,2 Нм, dвых = 20 мм.
На основании выполненного расчета был подобран шариковый радиально – упорный однорядный подшипник № 46106.
Также был выполнен расчет болтов на срез и прочностной расчет вала.
В пояснительной записке была рассмотрена конструкция электроусилителя. Выполнено описание разрабатываемого устройства и рассчитаны его основные элементы.
В программе: Компас 3D v

Чертеж анализа конструкций существующих нейтрализаторов
Код: 03.01.03.24.26В программе: Компас 3D v

Чертежи обзора мотовил для уборки полеглого стеблестоя
Код: 03.01.03.24.25В программе: Компас 3D v

Чертеж существующих конструкций загрузчиков сеялок
Код: 03.01.03.24.24В программе: Компас 3D v

Чертеж анализа существующих газораспределительных механизмов
Код: 03.01.03.24.23В программе: Компас 3D v

Чертеж обзора конструкций послеуборочной очистки зерна
Код: 03.01.03.24.22В программе: Компас 3D v

Чертеж обзора конструкций транспортирующих органов комбайнов
Код: 03.01.03.24.21В программе: Компас 3D v
Последние просмотренные материалы