Сборочный чертеж патрона рычажно-клинового с пневматическим приводом А1
Техническая характеристика:
- Давление сжатого воздуха в системе р=0,63 МПа
- Ход поршня h=48мм
- Сила на штоке пневмоцилиндра Р=2669Н
- Диаметр зажимаемых заготовок 15-240мм
Технические требования:
- Обеспечить герметичность привода
- Трущиеся поверхности смазать
- Воздушные каналы очистить и проверить на проходимость
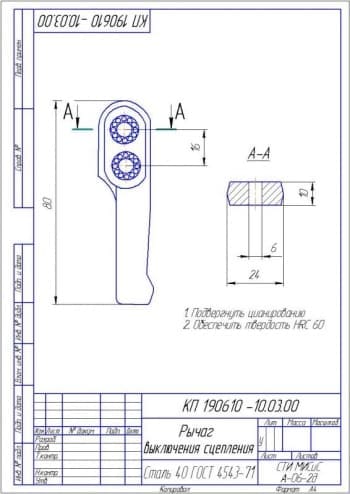
В клино-рычажном патроне деталь зажимается при помощи рычага.
Освобождают деталь при помощи втулки. Рычаги имеют шлифованные опорные поверхности, которыми они упираются в полуцилиндрические поверхности, имеющиеся в корпусе патрона. Механизм зажима трехкулачкового самоцентрирующегося рычажного патрона состоит из центральной втулки 2, рычага 1, сидящего на оси в корпусе патрона 3, и основного кулачка, установленного в Т-образных пазах корпуса. Для увеличения силы, передаваемой от привода, соотношение плеч рычага выбирают не менее чем 3:1. Движение от привода передается тягой, связанной с винтом.
Дополнительные материалы: прилагается расчетно-пояснительная записка на 8 страницах, где разработана конструкторская часть с разработкой трехкулачкового самоцентрирующегося рычажно-клинового патрона, который применяется для быстрого зажима и разжима деталей, обрабатываемых на токарных станках.
Выполнен расчеты: зажимных сил, оси и резьбы на срез и смятие, станочного приспособления на точность обработки. Произведен выбор привода. Описание пневматического привода патрона:
Шток поршня связан через промежуточную тягу с патроном. Сжатый воздух через неподвижную распределительную муфту 1, установленную на хвостовике цилиндра 12, поступает в левую или правую полости цилиндра, перемещая при этом поршень 3.Корпус 5, крышка 4 и поршень 3 изготовлены из алюминиевого сплава. Поршень уплотнен двумя Г-образными манжетами 8, между которыми установлено промежуточное кольцо 7. Манжеты закреплены кольцом 6. Сжатый воздух, поступая в пространство А под манжетой, поджимает борта ее к поверхности цилиндра, в результате чего создается необходимое уплотнение. Шток 9 и цилиндр уплотнены манжетой 10 при помощи кольца 11. Хвостовик 12 запрессован в крышку 4 и закреплен гайкой. Внутри муфты имеются две полости. Сжатый воздух, попадая в полости муфты, прижимает манжеты к валику, создавая надежную герметичность. Все манжеты изготовлены из хлорвинила или кожи.
Далее выполнен расчет привода и дано описание принципа контроля.
В программе: Компас 3D v

Рабочий чертеж шпинделя токарно-винторезного станка модели 16К20
Код: 03.01.05.02.01.08Создан программе Компас 3D V

Сборочный чертеж поводкового патрона с автоматическим раскрытием кулачков для токарного станка модели 16К20ФЗ
Код: 03.01.05.02.01.07Программа Компас 3D V

Сборочный чертеж коробки скоростей токарного станка z=18
Код: 03.01.05.02.01.06Создан программе Компас 3D V

Сборочные чертежи коробки скоростей токарного станка
Код: 03.01.05.02.01.05Создан программе Компас 3D V


Сборочный чертеж коробки подач токарного станка
Код: 03.01.05.02.01.04Создан программе Компас 3D V
Скачать бесплатно

Сборочный чертеж коробки подач токарного станка 12 45
Код: 03.01.05.02.01.03Программа Компас 3D V