Перечень чертежей:
- Чертеж кинематического анализа рычажного механизма формата А1 с графиками перемещения, скорости и ускорения точки Е, с планом механизма
- Силовой анализ А2:
- Рычаг Жуковского
- Начальное звено
- Планы сил диоды
- Рабочий чертеж синтеза зубчатых механизмов А2 со схемой зубчатой передачи и диаграммами:
- Относительных скоростей скольжения
- Зоны двупарного зацепления
- Коэффициентов удельных скольжений
- Синтез кулачкового механизма А1 с профилированием кулачка, определением минимального радиуса теоретического профиля кулачка и диаграммами движения толкателя и углов передачи
Дополнительные материалы: прилагается расчетно-пояснительная записка на 18 листах.
В пояснительной записке выполнен анализ и синтез механизмов строгального станка. Произведен кинематический анализ механизма, где выполнен структурный анализ рычажного механизма.
Механизм сбрасывателя - плоский рычажный. Определена степень подвижности 1. Установлено, что рассматриваемый механизм является механизмом 2-го класса.
Выполнено построение положений звеньев с вычислением параметров. Сделано определение скоростей, где рассчитаны угловые скорости звеньев 2-го – 3,86 с-1, 3-го – 36,7 с-1, 4-го – 233,2 с-1.
Произведено определение ускорений точек и звеньев механизма, построена диаграмма перемещения.
Приведен силовой анализ механизма. Сделано определение сил, действующих на звенья механизма, где определены значения:
|
№ |
Наименование |
Значение |
||||
|
Звено 1 |
Звено 2 |
Звено 3 |
Звено 4 |
Звено 5 |
||
|
1 |
Сила тяжести, Н |
200 |
460 |
750 |
530 |
700 |
|
2 |
Масса, кг |
20 |
46 |
75 |
53 |
70 |
|
3 |
Сила инерции, Н |
24000 |
99360 |
177280 |
85600 |
209760 |
|
4 |
Моменты от сил инерции, Н×м |
0 |
1771 |
2070 |
1263 |
-- |
Выполнено определение реакций в кинематических парах и уравновешивающей силы.
Определены реакции в кинематических парах структурной группы 2 – 3, равные 708000 Н и 712000 Н.
Приведен силовой расчет входного звена механизма с определением уравновешивающей силы, равной 521104 Н, по методу Жуковского 533354 Н. Рассчитана погрешность от определения величины уравновешивающей силы различными методами 2,3 %.
Произведен синтез эвольвентного зубчатого зацепления. Выполнен синтез кулачкового механизма графическим методом, где принят минимальный радиус- вектор теоретического профиля кулачка 103 мм и радиус ролика 20 мм. В данной работе произведен анализ и выполнено проектирование механизмов строгального станка.
В программе: Компас 3D v

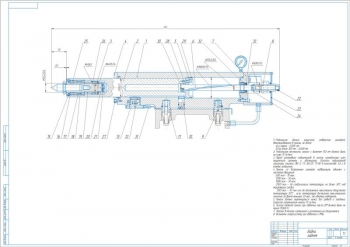
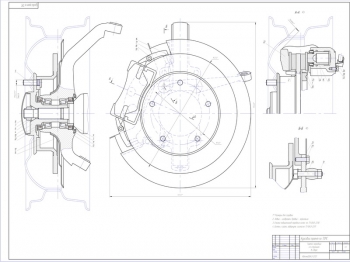
Проект зубострогального полуавтомата 5236П для нарезания конических зубчатых колёс
Код: 03.01.05.02.06.03Количество чертежей: 3 штуки
В программе: Компас 3D v, AutoCad

Большой набор рабочих чертежей узлов и деталей алмазно-заточного станка со спецификацией
Код: 03.01.05.02.06.02Спецификация – 7 листов в программе Автокад
Программе Автокад (AutoCAD)

Набор сборочных чертежей алмазно-заточного станка с рабочими чертежами деталей, кинематической схемы
Код: 03.01.05.02.06.01Программы Компас 3D V Автокад (AutoCAD)
Спецификация – 11 листов
Последние просмотренные материалы