Перечень чертежей:
- Чертеж динамического синтеза рычажного механизма, А1
- Динамический анализ рычажного механизма, А1
- Синтез и анализ зубчатых механизмов, А1
- Технический чертеж синтеза кулачкового механизма, А1
Дополнительные материалы: прилагается расчетно-пояснительная записка на 40 листах.
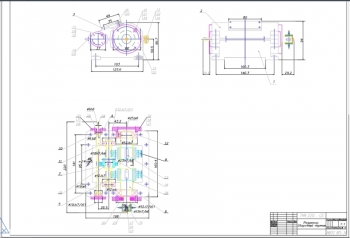
В проекте разработана конструкция механизма насоса с качающейся кулисой для перекачивания или откачки жидкости. Жидкость подается автоматически благодаря механизму с кулачками, который регулирует подачу. Поршень насоса движется вверх и вниз в цилиндре под воздействием электродвигателя, планетарного редуктора и шарнирно-стержневого механизма. Подъем поршня соответствует рабочему ходу, а опускание - холостому.
Рассмотрен динамический синтез рычажного механизма по заданному коэффициенту неравномерности хода машины. Целью динамического синтеза является создание метрических размеров для звеньев и разработка маховика, который устанавливается на входном звене рычажного механизма для снижения колебаний угловой скорости. Маховик - пассивная круглая деталь, устанавливаемая на ведущем валу машины для уменьшения неравномерности его вращения в установившемся движении. Он представляет собой колесо с тяжелым ободом, соединенным со ступицей прямыми спицами или сплошным диском.
Выполнен структурный анализ механизма. В состав механизма насоса включены пять подвижных звеньев: кривошип, кулисный камень, кулиса, ползун и неподвижная стойка. Он условно разделен на структурные группы, для каждой из которых определена степень свободы.
Изучен метрический синтез рычажного механизма с определением значений:
|
№ |
Наименование |
Значение |
|
1 |
Угол качения кулисы |
440 |
|
2 |
Длины: |
|
|
- Кулисы |
932 мм и 425 мм |
|
|
- Звеньев |
59,5 мм, 233 мм, 106 мм, 159 мм |
Описано построение повернутых планов скоростей. Составлены таблицы значений скоростей точек механизма.
Приведено описание динамической модели машинного агрегата с определением приведенных сил и моментов сопротивления. Машинный агрегат объединяет в себе компоненты двигателя, передачи и рабочей машины. Чтобы определить приведенную силу сопротивления, требуется заменить весь агрегат динамической моделью.
Рассчитаны значения кинетической энергии и приведенного момента инерции для всех положений механизма.
Определен момент инерции маховика 76,52 кг×м2, коэффициент динамичности 0,019.
Произведен динамический анализ рычажного механизма с построением плана ускорений, определением инерционной нагрузки звеньев, расчетом диад и кривошипа. Сделано определение уравновешивающей силы методом рычага Жуковского. Рассчитана мощность двигателя 2,5 кВт.
Сделан синтез и анализ зубчатых механизмов с выполнением геометрического расчета рядовой цилиндрической зубчатой передачи. Рассчитаны параметры: межосевое расстояние 147 мм, высота зуба 15,75 мм, радиус основной окружности 46,04 мм и 92,09 мм, делительный шаг зубьев 21,99 мм, длина линии зацепления 50,28 мм.
Выполнен синтез и анализ планетарного и кулачкового механизма с определением основных значений.
В программе: Компас 3D v

Готовые чертежи центробежного секционного насоса типа ЦНСГ с деталировкой и построением графиков и зависимостей профилирования рабочего колеса
Код: 03.01.01.07.06Спецификация – 3 листа
Программы Компас 3D V Автокад (AutoCAD)
Последние просмотренные материалы