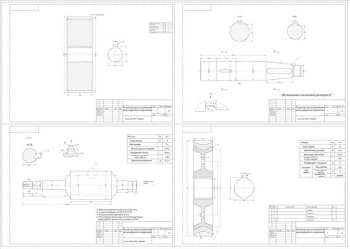
Перечень чертежей:
- Чертеж общего вида акустического автомобильного локатора на формате А1:
Монтаж вести согласно схеме электрической принципиальной
Монтажные провода условно не показаны
Паять припоем по ПОС-61, флюс ФСК
- Чертеж электрической принципиальной схемы А3
- Рабочий чертеж печатной платы из стеклотексталита СФ2-35-1,5 на формате А2 с техническими требованиями:
Указаны размеры для справок.
Плату изготовить комбинированным методом.
Плата должна соответствовать ГОСТ 23752-79 группа жесткости-1, класс точности 3 по ГОСТ23751-86.
Шаг координатной сетки 1,25мм.
Параметры отверстий приведены в таблице.
Надписи шрифтом 3,5 по ОСТ 4ГО.010.007 краской НЦ21 белого цвета ТУ16-594002-001-89.
Остальные технические требования по ОСТ 4ГО.070.014.
- Сборочный чертеж ФУ на формате А2
Монтаж вести согласно схеме электрической принципиальной.
Установку элементов производить по ГОСТ 29137-91
- диоды по варианту 140
- резисторы по варианту 140
- конденсаторы С2, С8 по варианту 140, остальные по варианту 200
- транзисторы по варианту 190
- микросхему DD1 по варианту 320
- микросхему DA1 по варианту 351
резонатор по варианту 180
- индуктивность по варианту 180
Выводы деталей изгибать не ближе 2мм. от корпуса, радиусы изгиба 1...2 мм.
Паять припоем по ПОС-61 ГОСТ 21931-76, флюс ФСК ОСТ 4ГО.033.000.
Проводники и контактные площадки условно не показаны.
Маркировка элементов показана условно.
Плату покрыть лаком Ф1-582 ТУ 6-10-1236-74 кроме поверхности S1.
Остальные технические требования по ОСТ 4ГО.070.015.
Дополнительные материалы: прилагается записка на 26 страницах с расчетом и проектированием конструкции автомобильного акустического локатора. Пояснительная записка содержит следующие главы: анализ задания; обоснование выбранного способа конструирования, содержащая возможные варианты корпуса, лицевой панели и компоновки всего прибора; расчет размеров функционального узла на печатной плате; расчет размеров корпуса; расчет размеров функциональных групп лицевой панели; расчет размеров надписей на лицевой панели.
Результатом работы является разработка малогабаритного акустического локатора для автомобиля, обеспечивающего следующие параметры: частота выходного сигнала с передатчика 8 ГГц, время измерения расстояния менее 1с. Питание локатора осуществляется аккумулятора автомобиля.
Пояснительная записка к курсовому проекту содержит следующие конструкторские документы: схему электрическую принципиальную, перечень элементов схемы, чертеж печатной платы, сборочный чертеж функционального узла на печатной плате, спецификацию, чертеж общего вида, таблицу общего вида, электромонтажный чертеж.
Двигаясь задним ходом, водитель ориентируется по зеркалам заднего вида. Зеркала не дают полную видимость, а также по ним нельзя с точностью определить расстояние до преграды. Водитель не может видеть определенную зону пространства. В эту зону могут попасть люди, животные. Предлагаемое устройство исключает эту ситуацию. Наряду с акустическим локатором существует множество подобных приборов, но из-за их дороговизны они не всегда доступны автомобилистам. Эту проблему решает акустическая локация. В сравнении с аналоговыми приборами акустические излучатели имеют существенную разницу в цене с датчиками расстояния.
Благодаря своей простоте и дешевизне по сравнению с аналогичными предлагаемый к проектированию прибор может приобрести широкое применение.
Содержание:
Введение
1. Анализ задания
2. Теоретическая часть
2.1. Выбор конструкции корпуса прибора
2.2. Анализ элементной базы
3. Расчетная часть
3.1. Расчет размеров функционального узла
3.2. Расчет размеров корпуса прибора
3.3. Расчет размеров надписей
3.4. Расчет размеров функциональных групп
3.5. Расчет размеров лицевой панели
4. Заключение
5. Список литературы
Приложение
Приложение 1. Схема электрическая принципиальная
Приложение 2. Перечень элементов
Приложение 3. Чертеж платы печатной
Приложение 4. Сборочный чертеж
Приложение 5. Спецификация
Приложение 6. Чертёж общего вида
Приложение 7. Таблица чертежа общего вида
Структурная схема принципа работы автомобильного акустического локатора:
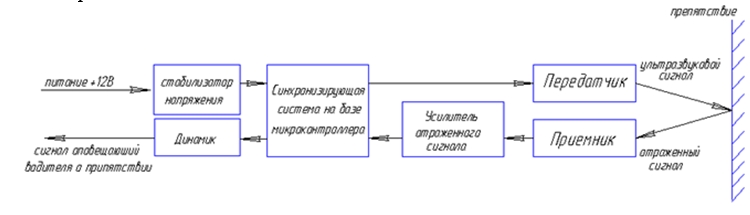
Весь прибор питается от аккумуляторной батареи U=12(В), которой питается вся электрическая система автомобиля. Сам прибор можно подключить непосредственно к аккумулятору. Но при этом придется тянуть провода с капота в салон. Поэтому в качестве источника питания рекомендуется выбрать какой-нибудь прибор, встроенный в переднюю панель и имеющий на входе постоянное напряжение U=12(В). Итак, сигнал с амплитудой 12(В) поступает на вход стабилизатора напряжения, выполненного на основе микросхемы КР142ЕН5А. Далее сигнал с амплитудой уже 5(В) поступает в синхронизирующую систему на базе микроконтроллера Z86E0208PSC. Внешняя времязадающая цепь этого микроконтроллера (МК) состоит из кварцевого резонатора ZQ1 и конденсаторов С3,С4. С выводов 15, 16 МК сигнал поступает непосредственно в передатчик. С выхода передатчика ультразвуковой сигнал, отразившись от препятствия, попадает на вход приемника. Принятый отраженный сигнал усиливается транзисторами VT1-VT3 после чего сигнал постоянной составляющей 2,5(В) подается на неинвертирующий вход 9(Р32) встроенного компаратора МК. На инвертирующий вход 10 (Р33) компаратора поступает образцовое напряжение 2,7(В) с делителя R1-R3, что обеспечивает выделение полезного сигнала на уровне принятых помех. И, наконец, сигнал с выводов 17, 18 поступает на вход пьезокерамического излучателя, которым формируется сигнал, оповещающий водителя о препятствии в невидимой зоне.
Принцип работы локатора основан на том, чтобы отраженные сигналы не накладывались на передаваемые передатчиком. Более детально эту процедуру описывает график:
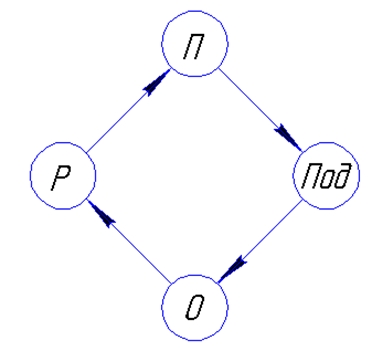
Он включает в себя четыре состояния: П-(передача) формирование пачки импульсов; Под.-(подавление) подавление послезвучания излучателя; О-(ожидание) ожидание отраженного сигнала; Р-(расчет) вычисление расстояния до препятствия. Итак, при включении питания происходит сброс устройства и инициализируется состояние П. Далее происходит подавление послезвучания излучателя в котором устройство не реагирует на принятый отраженный сигнал. После подавления устройство переходит в состояние О, в котором оно ожидает прихода полезного отраженного сигнала. Далее происходит расчет расстояния до объекта.
Спецификация – 7 листов
В программе: Компас 3D v
Последние просмотренные материалы